Unidad 6: Diseno de sistemas de control por PID
Science & Technology News
Sexta unidad del curso de sistemas dinámicos y de control, para estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Location:
United States
Genres:
Science & Technology News
Description:
Sexta unidad del curso de sistemas dinámicos y de control, para estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Language:
Spanish
Episodes
6.5 Diseño de controlador PID con Simulink
5/31/2016
Pasos para el diseño de control proporcional-integral-derivativo PID, mediante la herramienta Simulink del software Matlab, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:07:54
b) Diseño en el dominio del tiempo CAR
5/31/2016
Diseño en el dominio del tiempo para compensadores de adelanto-atraso ( o adelanto-retardo) de fase, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:03:45
a) Diseño en el dominio de la frecuencia CAR
5/30/2016
Diseño en el dominio de la frecuencia para el compensador de adelanto-atraso (o adelanto-retardo) de fase, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:06:47
6.4.3 Compensador de adelanto-atraso
5/30/2016
Descripción del compensador de adelanto-atraso de fase para implementar en sistemas de control, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:51
b) Diseño en el dominio de la frecuencia CR
5/30/2016
Diseño en el dominio de la frecuencia para el compensador de atraso o retardo de fase, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:04:09
6.4.2 Compensador de atraso
5/30/2016
Descripción del compensador de atraso de fase en el dominio del tiempo para implementar en sistemas de control, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:02:25
c) Compensador de adelanto de etapas múltiples
5/30/2016
Diseño en el dominio de la frecuencia y en dominio del tiempo para el compensadores de adelanto de fase de etapas múltiples, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:00:56
b) Diseño en el dominio de la frecuencia CA
5/30/2016
Diseño en el dominio de la frecuencia para el compensador de adelanto de fase, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:03:37
a) Diseño en el dominio del tiempo CA
5/30/2016
Diseño en el dominio del tiempo para compensadores de adelanto de fase, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:57
6.4.1 Compensador de adelanto
5/30/2016
Descripción del compensador de adelanto de fase para implementar en sistemas de control, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:32
6.4 Diseño de compensadores
5/30/2016
Descripción de los tipos de compensadores implementados en sistemas de control, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:33
6.3.2 Segundo método de Ziegler-Nichols
5/29/2016
Segundo método propuesto por Ziegler y Nichols para la sintonización o ajuste del control proporcional-integral-derivativo PID, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:02:13
6.3.1 Primer método de Ziegler-Nichols
5/29/2016
Primer método propuesto por Ziegler y Nichols para la sintonización o ajuste del control proporcional-integral-derivativo PID, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:02:01
6.3 Métodos de ajuste de controladores PID
5/28/2016
Reglas para la sintonización o ajuste del control proporcional-integral-derivativo PID, basado en el método de Ziegler-Nichols utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:20
6.2.2 Diseño en el dominio de la frecuencia PID
5/28/2016
Diseño en el dominio de la frecuencia para controladores proporcional-integral-derivativo PID, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:02:56
6.2.1 Diseño en el dominio del tiempo PID
5/27/2016
Diseño en el dominio del tiempo para controladores proporcional-integral-derivativo PID, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:05:13
6.2 Diseño de controladores PID
5/27/2016
Pasos para el diseño de control proporcional-integral-derivativo PID, utilizados en procesos o plantas industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:03:30
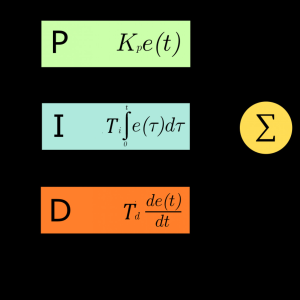
6.1.6 Acción de control proporcional-inegral-derivativa
5/20/2016
Definición de la acción de control proporcional-integral-derivativa PID, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:02
b) Diseño en el dominio de la frecuencia PD
5/20/2016
Diseño en el dominio de la frecuencia para controladores proporcional-derivativo PD, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:34
a) Diseño en el dominio del tiempo PD
5/20/2016
Diseño en el dominio del tiempo para controladores proporcional-derivativo PD, que se presentan o implementan en procesos industriales, correspondiente a la Unidad 6: Diseño de sistemas de control por PID, perteneciente al curso de Sistemas Dinámicos y de Control. Dirigido a estudiantes de ingenierías mecánica, eléctrica, electrónica y afines.
Duration:00:01:21